WIRES – Wiring Robotic System for Switchgears
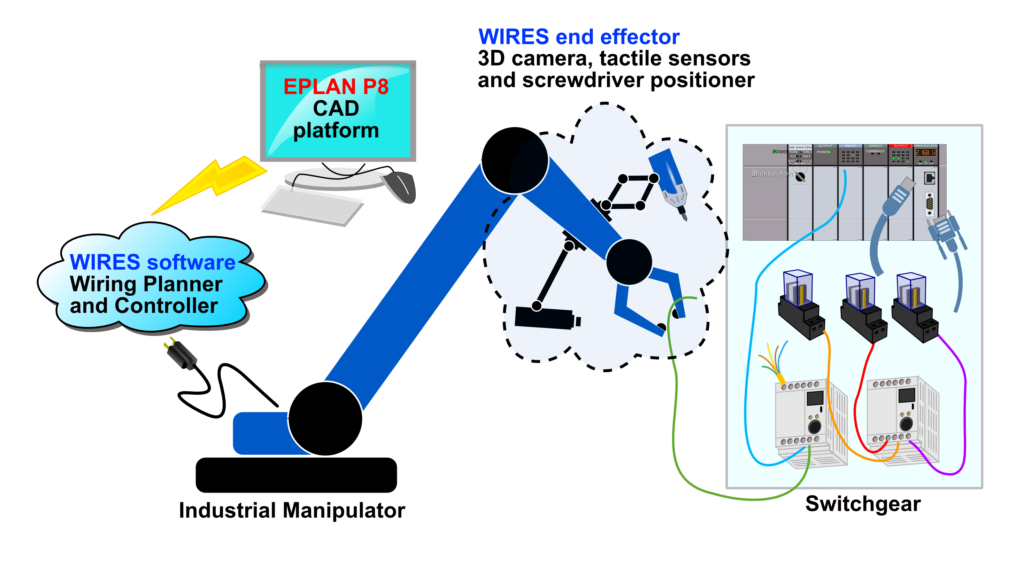
The experiment aims to improve production quality of switchgears by automatising the wiring process which is currently handled manually. The experiment will contribute in software as well as hardware (grippers) in order to come up with a robotic solution for wiring. The main challenge is to develop a new gripper with tactile sensors which can handle deformable objects such as wires and simultaneously operate on screw/clip type connection points.
For the gripper, UNIBO will use an existing industrial parallel gripper and equip it with tactile sensors provided by SUN. UNIBO will also mount a 3-degree of freedom (DOF) screw driver positioner and a 3D camera on the gripper. IEMA will develop a software package that utilizes CAD data of the mechanical switch gear to optimise wiring sequence and plan the robot trajectories.
All the technologies developed within the WIRES experiment aim at reducing the time for switchgear wiring and at improving the product quality. The foreseen reduction of the wiring time is about 40% with respect to the overall wiring time, due to the fact that at least part of the overall wiring process can be executed by the automatic system also overnight. It is clear that the achievement of these objectives will have a very strong impact on product cost and company income.
Contact:
Gianluca Palli
Email: gianluca.palli@unibo.it
DIII – Seconda Università di Napoli
Internet: www.diii.unina2.it
I.E.M.A. s.r.l.
Internet: www.iemasrl.com


Social





