SAGA – Swarm Robotics for Agricultural Applications
The goal of the experiment is to prove the applicability of swarm robotics to precision farming. The application of swarm intelligence principles to agricultural robotics can lead to disruptive innovation, thanks to the parallel operation of multiple robots and their cooperation. The experiment aims at demonstrating such advantages and comparing them with the current state of the art within the context of a monitoring/mapping scenario.
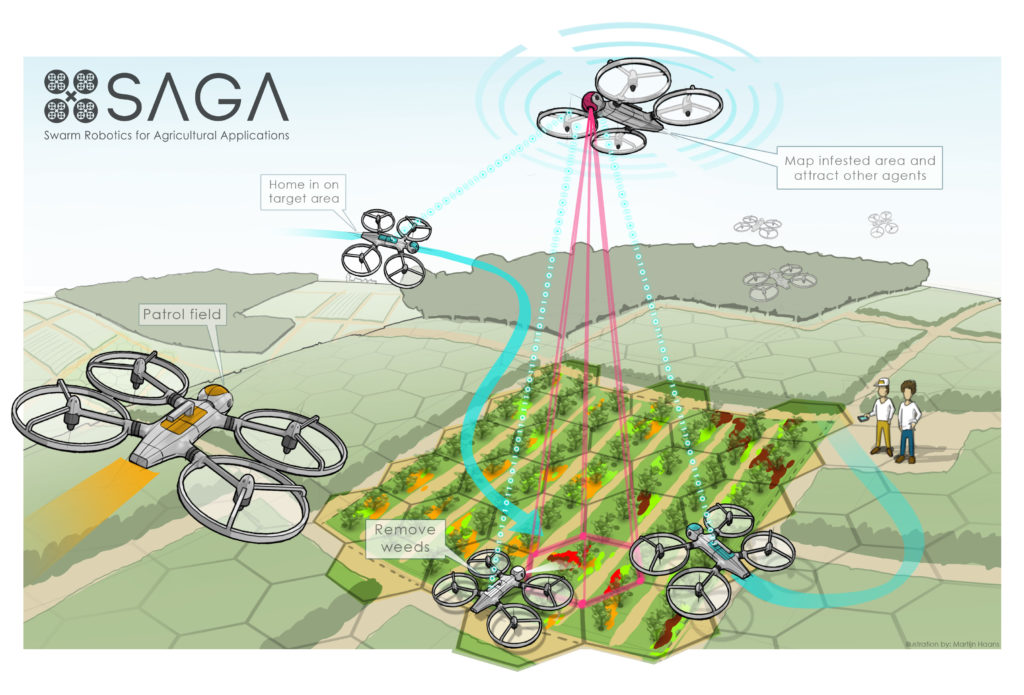
By exploiting swarm robotics principles, a group of small unmanned aerial vehicles (UAVs) will be deployed to collectively monitor a sugar beet field and cooperatively map the presence of volunteer potatoes, which are a major threat as they spread diseases (e.g., late blight) and facilitate harmful soil nematodes. Hence, it is very important to precisely map the presence of volunteer potatoes to facilitate weed control procedures. In particular, it is very important to determine when to perform weeding on which parts of the farm land (sometimes spanning hundreds of hectares). Currently, this planning task requires repetitive and labor intensive monitoring.
An existing multi-rotor UAV will be enhanced with on-board camera and vision processing, radio communication systems and suitable protocols to support safe swarm operations. On-line, on-board processing is key for weed detection, as the UAV needs to fly close to the plants to obtain images of sufficient quality, and this should be done only when there is some evidence of weed to reduce flight time and energy expenditures. Hence, a trade off between accuracy and flying costs must be considered. The proposed solution exploits multiple UAVs that can focus on areas of interest while abandoning those areas of the field that do not require closer inspection.
The experiment will develop robust on-board vision routines capable of supporting local navigation and discerning weeds from cultivated plants. Collectively, the robots will build a map of the field with semantic tags associated with different areas, so as to convey precise information about the presence and amount of weed in the different parts of the field. This will facilitate optimal spatiotemporal planning of weeding operations, and autonomous precision weed removal in the future.
For further information please refer to: http://laral.istc.cnr.it/saga/
Contact:
Joop aan den Toorn
Avular B.V.
Achtseweg Zuid 153G
Building TQ3 floor 1
5651 GW Eindhoven
m: +31 (0)6 411 997 71
e: j.adtoorn@avular.com
w: www.avular.com



Social





