RadioRoSo – Radioactive Waste Robotic Sorter
The scope of RadioRoSo is decommissioning operations performed in nuclear waste storage facilities. A significant amount of old and undocumented nuclear waste is buried underground in unused mines in several countries. Many of these facilities, created as far as 50 years ago, pose a safety and environmental risk, and thus several countries have started or considering the decommissioning of this waste in safer facilities. The main challenge is sorting the waste according to radioactivity level and compressibility, to achieve efficient storage in modern and safer facilities.
Decommissioning is a complex and expensive process. Large industrial cells are manufactured around the storage silos. Sorting is done manually by using mechanical master-slave manipulators. The process is very slow and tiring for the workers, thus requiring short shifts, a high number of workers and along training. The overall costs are huge.
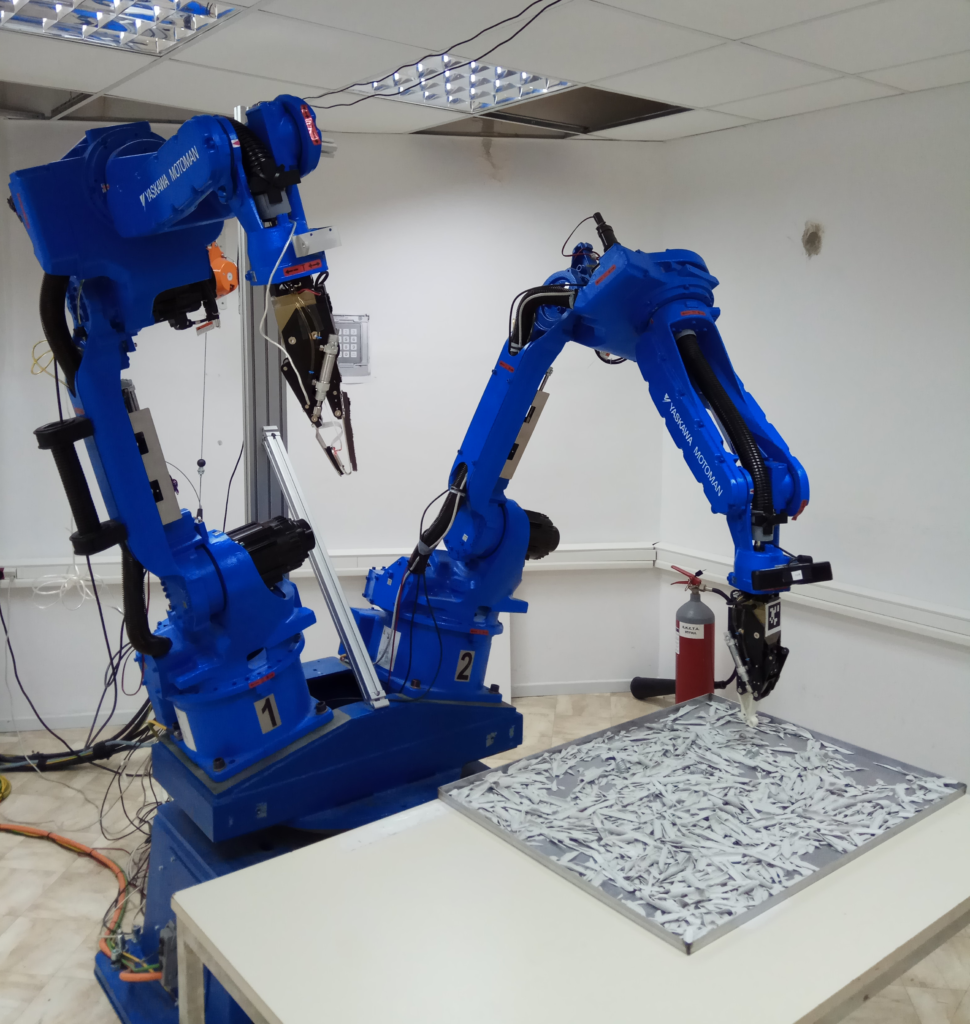
The experiment will demonstrate that this job may be done by robots autonomously, much faster and with significantly lower cost. State-of-the-art machine vision, robotic manipulation and grasping will be employed to solve this real-world task. A special gripper will be prototyped to address the mid-level radioactivity conditions in the sorting cell.
Contact:
Center for Research and Technology Hellas
Sotiris Malassiotis
Email: malasiot@iti.gr
Internet: www.iti.gr
ANSALDO – Nuclear Engineering Services Ltd.
Andrea Basso
Email: Andrea.Basso@Ansaldo-NES.com
Internet: www.ansaldo-nes.com
National Radiation Protection Institute
Jiří Hůlka
Email: jiri.hulka@suro.cz
Internet: www.suro.cz
Universita degli Studi di Genova
Matteo Zoppi
Email: zoppi@dimec.unige.it
Internet: www.dimec.unige.it/
Czech Technical University
Vasek Hlavac
Email: Vaclav.Hlavac@cvut.cz
Internet: cmp.felk.cvut.cz



Social





