INJEROBOTS – Universal Robotic System for Grafting of Seedling
Grafting in horticultural seedling industry is a common hand-made practice, with the objective to achieve a stronger and more productive plant. Currently, grafting of seedlings is a very important part of the horticultural production industry in Europe, accounting for solanaceae (tomato, pepper and eggplant) market up to 38% of world production, with more than 200 Million grafted plants annually, and for cucurbitaceae (watermelon, melon and cucumber) market up to 47% of world production, with more than 120 million of grafted plants annually.
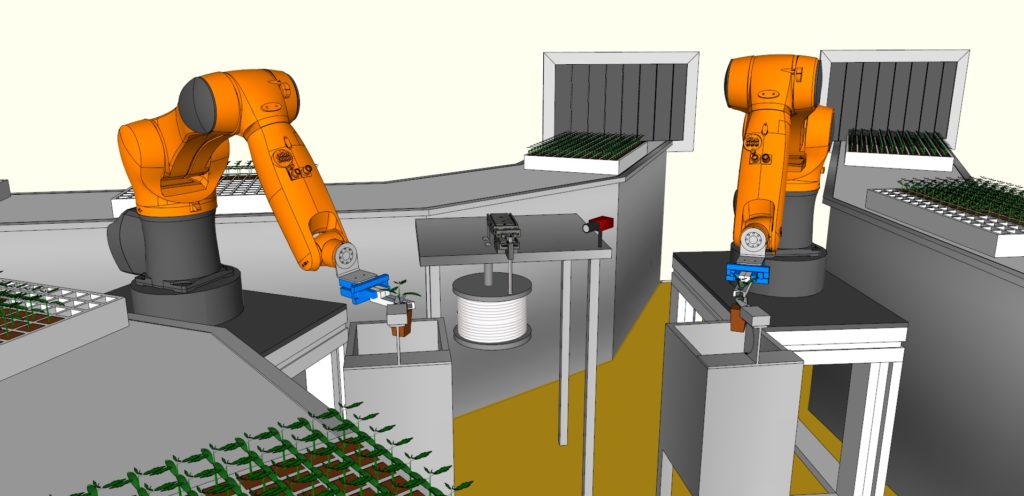
INJER-ЯOBOTS goal is to perform a universal and flexible robotic System for grafting of horticultural seedlings, based on the cooperative work of two anthropomorphic robots supported by artificial vision, and external devices. The key strategy of this approach is based on two main concepts: (1) the application of grafting techniques over several species with a single robotic system, which allows for the reduction of downtimes between commercial seasons, and (2) the precise control of the grafting process taking advantage of the precision and repeatability of commercial robotic arms.
INJER-ЯOBOTS will attempt to solve a horticultural problem introducing equipment, techniques and work practices that had not been applied previously for grafting seedlings, generating results in equipment evolved with respect to existing systems and that responds to needs of plant nurseries and farmers.
Contact:
CT TECNOVA
Guadalupe Lopez
Javier Rodriguez
Email: glopez@fundaciontecnova.com
industrial@fundaciontecnova.com
Website: www.fundaciontecnova.com
ROBOTNIK AUTOMATION
Roberto Guzmán
Marc Bosch
Email: rguzman@robotnik.es
mbosch@robotnik.es
Internet: www.robotnik.es
INGRO MAQUINARIA
Juan Pedro Martinez
Jose García
Email: administracion@ingromaquinaria.com
jgarcia@ingromaquineria.com
Internet: http://www.ingromaquinaria.com/
Social





